




Thün, Velikov, McGee and Tish present Infundibuliforms at the 2017 FABRICATE Conference
Thün, Velikov, McGee and Tish present Infundibuliforms at the 2017 FABRICATE Conference
Associate Professors Geoffrey Thün and Kathy Velikov will present “Infundibuliforms: Kinetic Systems, Additive Manufacturing for Cable Nets and Tensile Surface Control” co-authored with Assistant Professor Wes McGee and Dan Tish (M.Arch 2015) at FABRICATE 2017 hosted by the ICD at the University of Stuttgart and the Bartlett School of Architecture, UCL, London April 6-8 2017.
FABRICATE is an international peer reviewed conference with supporting publication on the theme of Digital Fabrication. Discussing the progressive integration of digital design with manufacturing processes, and its impact on design and making in the 21st century, FABRICATE brings together pioneers in design and making within architecture, construction, engineering, manufacturing, materials technology and computation. Discussion on key themes include: how digital fabrication technologies are enabling new creative and construction opportunities from component to building scales, the difficult gap that exists between digital modelling and its realisation, material performance and manipulation, off-site and on-site construction, interdisciplinary education, economic and sustainable contexts.
What is unique about FABRICATE is that it features cutting-edge built work from both academia and practice. Selected built work and work-in-progress is presented and discussed at the conference, and featured in the state-of-the-art accompanying publication. This sets FABRICATE apart from the traditional paper-based peer reviewed conferences with proceedings. Because of the time and effort involved in bringing this outstanding quality of work to life but, most importantly, in order to allow sufficient time for exceptional work to happen across academia and practice, the event is designed to occur every 3 years
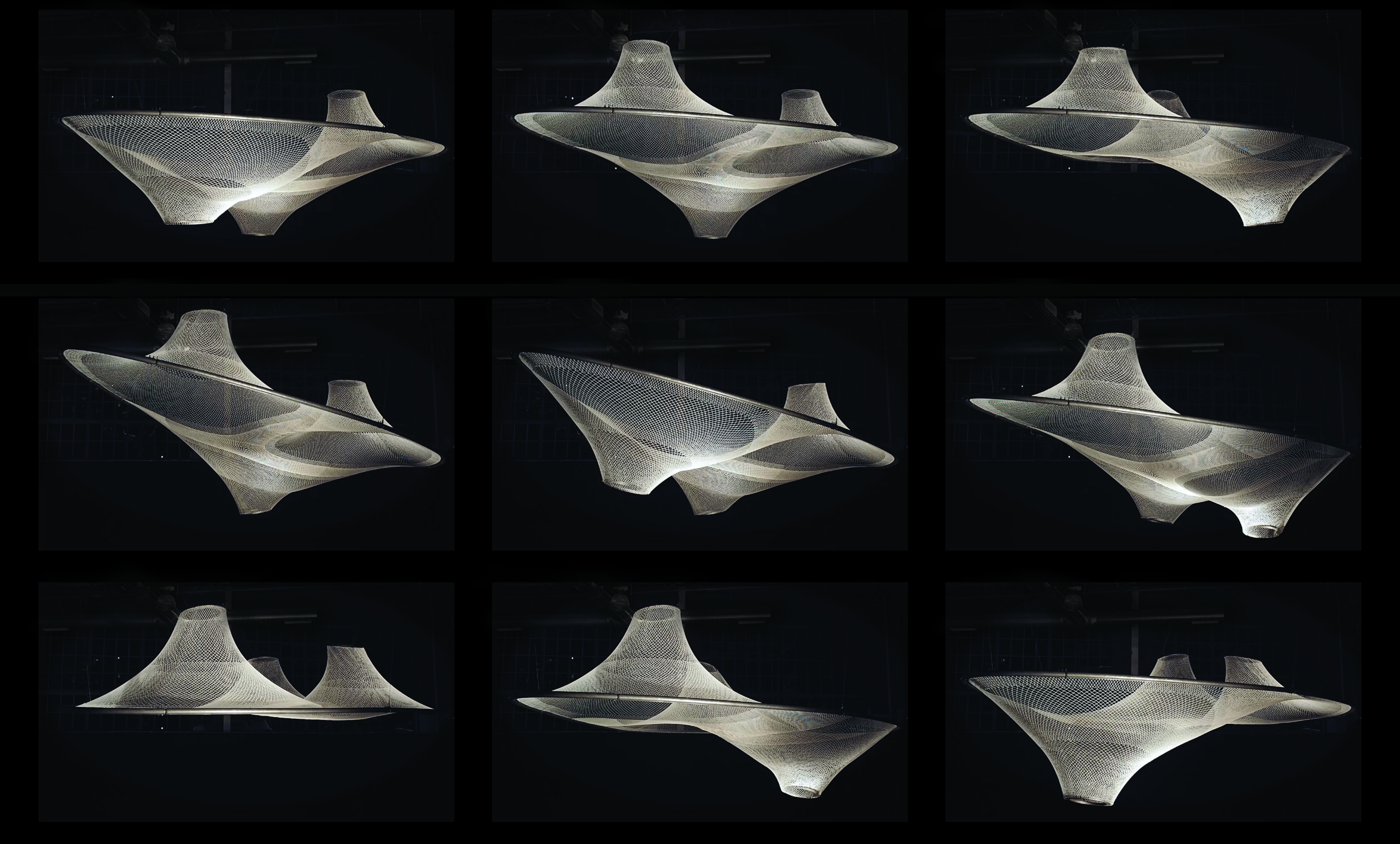
Infundibuliforms advances research in lightweight, kinetic surfaces that have the capability to create spatial enclosures with minimal amounts of material and that are able to dynamically adapt at low energetic cost. Since the middle of the last century, there has been increased interest in adaptable structures involving motion systems, or, as Frei Otto and his colleagues preferred to call them, “convertible” structures (Otto 1972). This prototype-based research uses cable robotics to deform a tensile 3D printed cable net surface. The work advances three parallel trajectories in computational, fabrication, and geometric research.
- The development of a dynamic model to both simulate and control operation of the physical system in real time.
- New tools and methods for robotic additive manufacturing to enable the 3D printing of thermoplastic elastomers for tensile surfaces.
- A geometric methodology for developing cable nets that could be loaded to produce tailored catenoid forms using spring-based simulation methods.
Infundibuliforms was developed with seed funding support through a 2015 Taubman College Research Through Making Grant, and a 2015 Small Projects Grant from the University of Michigan Office of Research.
For more information on the FABRICATE Conference, click here
To download a free copy of the Conference Publication from UCL Press, click here.




